In der heutigen Zeit sind ruckfreie und ruhige Kamerafahrten aus der Filmindustrie
nicht mehr wegzudenken. In Spielfilmen, Dokumentationen, Talkshows und Internetvideos
sind derartige Kamerafahrten zu sehen. Diese können durch unterschiedliches
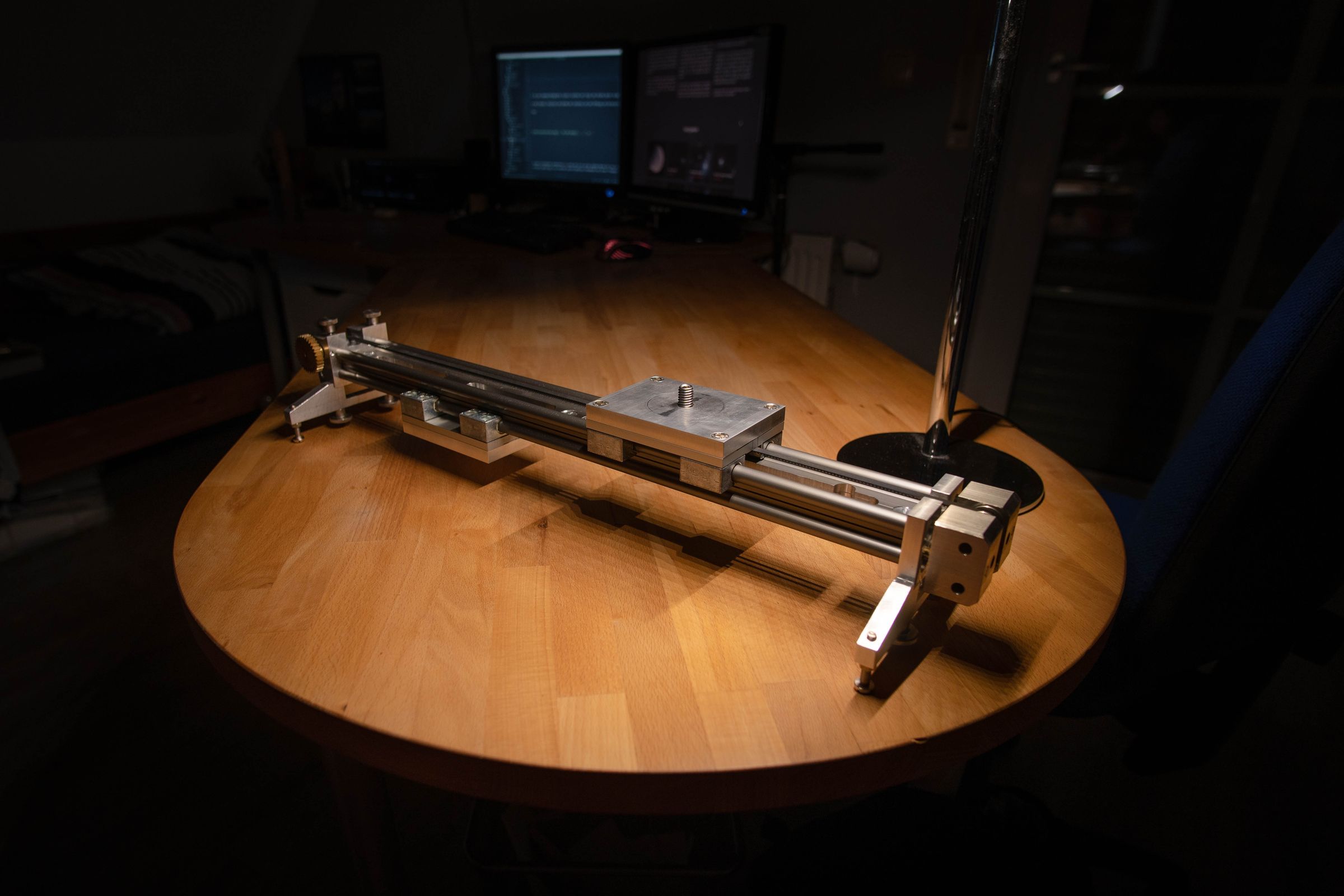
Equipment realisiert werden, wie beispielsweise mithilfe eines Kamera-Sliders. Solcher ist als ein System zur linearen Bewegung einer Kamera auf einer Strecke definiert. (vgl. WIKIPEDIA 2018)
Der folgende Artikel umreißt eine Projektarbeit deren Thematik die Entwicklung, der Bau und die Ansteuerung eines Kamera-Sliders zur Realisierung von bewegten Zeitraffern ist.
Zunächst widmen wir uns einer Zielvorstellung, die die Randbedingungen begrenzen soll, woraufhin diese in der Konstruktion beachtet werden können. Der Kamera-Slider (i.F. K-S) sollte zunächst fähig sein, eine Spiegelreflex- oder Systemkamera mit einem Gewicht von maximal 3 kg, sicher tragen zu können und dabei eine ausreichend lange Slidelänge besitzen. Dennoch ist ein handhabbares Packmaß, mit geringem Gewicht, wünschenswert. Die elektrische Schaltung zur Ansteuerung des K-S sollte in einem kleinem Behältnis untergebracht werden. Er sollte einen Antrieb besitzen, um eine homogen durchgehende oder sequenzierte Fahrt zu realisieren. Die Installation des Motors sollte unkompliziert und schnell durchführbar sein, um gegebenenfalls eine Kamerafahrt auch per Hand durchführen zu können. Die Benutzeroberfläche des Programms soll einfach und verständlich gestaltet sein, um die Einstellungen möglichst schnell und problemlos treffen zu können. Um den bewegten Zeitraffer präziser zu erstellen, muss die Kamera, durch einen Impuls am vorgegebenen Zeitpunkt, ausgelöst werden. Außerdem muss der K-S sehr zuverlässig funktionieren, um z. B. selbst anzuhalten, wenn er das Ende der Schiene erreicht. Jederzeit muss der K-S auf Eingaben reagieren können, um z. B. die Fahrt, auf Wunsch, zu unterbrechen. Der Motor, der Steuerungscomputer und andere elektrische Komponenten sollen aus einer gemeinsamen und vom Stromnetz unabhängigen Stromquelle ihre Energie beziehen. Damit ist der K-S unabhängig einsetzbar.
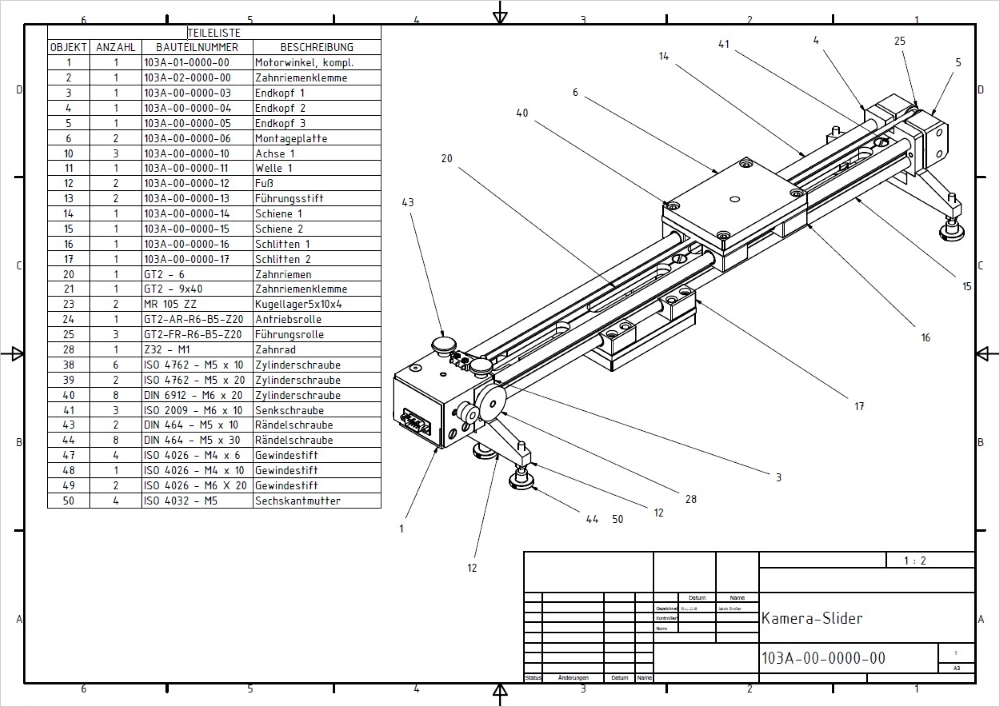
Die Einzelteile des K-S werden in einem 3D CAD Programm konstruiert und anschließend in einer Baugruppe verknüpft. Aus den Einzelteilen werden technische Zeichnungen abgeleitet. Zur Umsetzung der Zielvorstellung werden hier einige Variantenvergleiche, Auslegungen und Berechnungen durchgeführt. Die Entscheidungsfindung ist hier sehr komplex, da eine Variante andere Lösungen beeinflussen kann. Bei Fragen zur Auslegung und der Variantendiskussion kontaktiere uns gern über das Kontaktformular.
Mechanische Bauteile
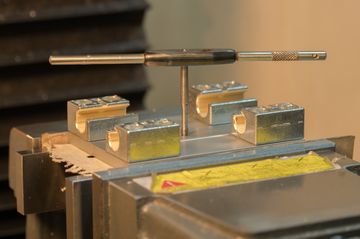
Größtenteils wurden die Bauteile auf einer Fräsmaschine gefertigt. Als Werkstoff haben wir uns für Aluminium 6061 entschieden, da die erforderlichen Aussparungen, Fasen, Bohrungen und Gewinde mittels spanenden Verfahren zuverlässig herzustellen sind. Bohrungen und Senkungen sind mit einer Ständerbohrmaschine gefertigt worden. Die benötigten Gewinde wurden meist händisch aber auch unter Hilfe der Ständerbohrmaschine geschnitten. Rotationssymmetrische Bauteile konnten mit einer Drehmaschine angepasst werden.
Elektrische Schaltung
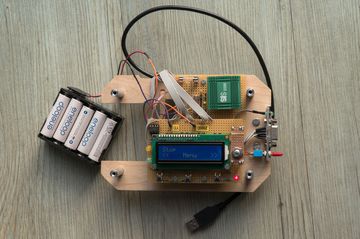
Zunächst haben wir einen Schaltplan entworfen. Der Schaltplan wurde daraufhin auf mehrere Streifenrasterplatinen übertragen und die erforderlichen Bauelemente aufgelötet. Durch Litzen und Bandkabel sind die Platinen untereinander und die Bauelemente mit der Platine, sowie mit der Schnittstelle zum K-S (D-Substecker) verbunden. Um die Schaltung zu schützen, wurde sie, mithilfe von Abstandshaltern, einer Holzplatte und mit Schrauben, in einer Plastikdose montiert.
Der K-S ist auf Grundlage eines Zweischlittensystems aufgebaut, d.h. dass zwei Schlitten sich entgegengesetzt zueinander am Slider bewegen indem sie z.B. durch einen Zahnriemen miteinander verbunden sind. Wenn ein Schlitten auf einem Stativ befestigt wird, dann bewegen sich „die Schienen […] zusammen mit der Kamera [und dem Schlitten]“ (EDELKRONE 2018). Dies bedingt eine lange Slidelänge bei vergleichsweise geringem Packmaß. Außerdem verlängert sich die effektive Slidefahrt in Bewegungsrichtung des K-S, da “sich die Schienen zusammen mit der Kamera bewegen, werden sie in […] [den] Aufnahmen nicht zu sehen sein“ (EDELKRONE 2018), um damit den Bildausschnitt nicht zu beeinträchtigen.

Die Ansteuerung realisiert ein Arduino UNO. Dieser kann über die Arduino IDE Software programmiert werden und koordiniert die Eingabe, Verarbeitung und Ausgabe. Die Ansteuerung muss dabei im elektrischen Schaltkreis auf die einzelnen Bauelemente angepasst werden. Bspw. ist für die Motorsteuerung ein L293D H-Bridge IC Motor Controller eingebaut, um den Arduino vor zu hohen Stromstärken aber auch durch den Nachlauf des Motors verursachte Induktionsströme zu schützen. Ebenfalls kann die Kamera zum richtigen Zeitpunkt automatisch ausgelöst werden. (siehe Fernauslösen der Kamera ↓)
Aufgrund der gut abgrenzbaren Aufgabenverteilung bietet sich eine mehrfache Verzweigung (switch-case Struktur) als Programmgrundlage an. Die Menu- und Motoransteuerung, Displayausgaben, Endschalterbedinungen, Tastenentprellungen, Auslösen der Kamera etc. sind in Funktionen und Prozeduren erfasst, um eine Redundanz zu verhindern und somit eine vereinfachte Bearbeitung und Fehlersuche zu ermöglichen.

Die durchgehende Fahrt ermöglicht ruhige, bewegte und verwacklungsfreie Videoaufnahmen. Hierbei gilt es, ebenfalls später bei der sequenzierten Fahrt, zu beachten, dass ein Motorstop erforderlich ist, wenn die Schlitten an die Endköpfe stoßen. Dafür sind zwei Endschalter montiert, um dieses Ereignis zu erfassen.
Um Makroaufnahmen zu filmen oder einen Zeitraffer auf Grundlage eines Video zu filmen ist es möglich die Geschwindigkeit der Fahrt zu steuern. Da der Arduino nicht in der Lage ist Spannung zu regulieren, kann dies über eine Pulsweitenmodulation realisiert werden. Dabei ist der Arduino in Lage einen analog Pin den Effektivwert der Spannung in 256 Stufen zu ändern. Die Auswirkung auf die Spannung wird im Abbild eines Oszilloskops sichtbar.
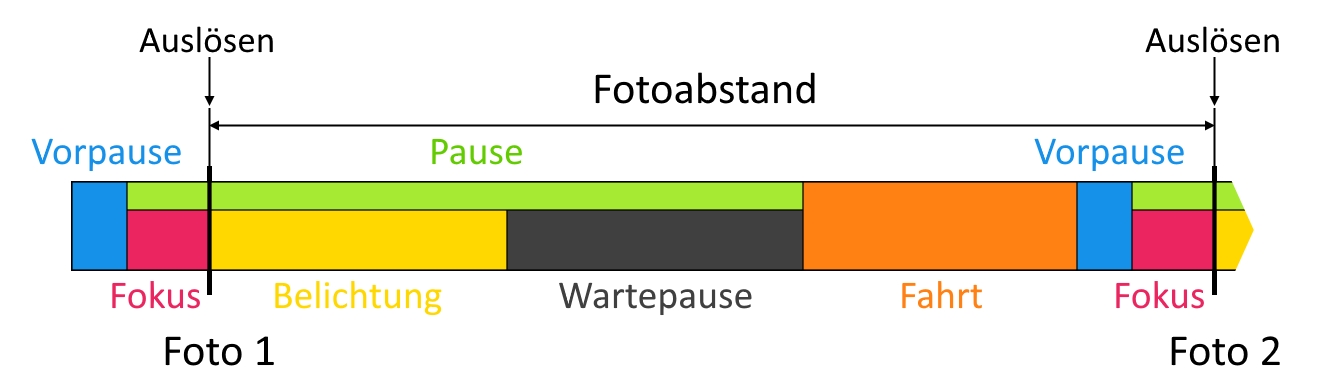
Für die Erstellung eines bewegten Zeitraffers auf Grundlage einer Fotoserie ist eine sequenzierte Fahrt notwendig. Der Schlitten verändert in bestimmten Zeitintervallen seine Position und die Kamera löst in der Pause aus. Um einen reibungslosen Ablauf zu garantieren ist eine Sequenz in verschiedene Intervalle aufgeteilt.
| Vorpause | Beruhigung des Systems |
|---|---|
| Pause | Zeit in der Schlitten steht |
| Fokus | Fokussierung |
| Belichtung | Belichtungszeit |
| Wartepause | Abwarten des restlichen Fotoabstandes / Verarbeitung des erstellten Fotos |
| Fahrt | Fahrtzeit |
| Auslösen | Impuls zum Auslösen der Kamera |
| Fotozahl | Anzahl der Fotos |
| Fotoabstand | Abstand zwischen den Fotos |
Tabelle 1: sequenzierte Fahrt, Intervalleinteilung
Damit die Kamera zuverlässig zum richtigen Zeitpunkt auslöst und ihre Belichtung beginnt, kann diese über den K-S gesteuert werden. Am K-S ist dabei eine 2,5 mm Klinkenbuchse montiert, die mit entsprechendem Adapterkabel mit der Kamera verbunden werden kann. Die 2,5 mm Klinkenbuchse am K-S ist mit folgender Pinbelegung beschaltet:
| Spitze | Fokussieren |
|---|---|
| erster Ring | Auslösen |
| zweiter Ring | Masse |
Durch das Verbinden der Spitze mit Masse fokussiert die Kamera und durch die Verbindung des ersten Rings mit Masse löst die Kamera aus. Um Beschädigungen an der Kamera zu vermeiden, ist diese von der restlichen Schaltung des K-S galvanisch mithilfe eines Optokopplers getrennt. Der Optokoppler wirkt in dieser Schaltung als Schalter und ist ein optoelektronisches Bauelement, in dem auf der einen Seite eine Leuchtdiode und auf der anderen Seite eine Fotodiode verbaut ist. Im lichtundurchlässigen Gehäuse schaltet die Fotodiode Durchgang, wenn die Leuchtdiode leuchtet. Der Arduino steuert die Leuchtdiode und die Fotodiode schaltet die Kamera. Für den Fotografen wird mit der gelben LED die Fokuszeit und mit der grünen LED die Auslösung angezeigt.
Als Grundlage diente uns eine sehr gute Anleitung von elbebilder.de: https://technik.elbebilder.de/2012/12/03/kamera-mit-arduino-fernsteuern/
Abschließend kann festgehalten werden, dass es mit entsprechendem Zeitaufwand möglich wird eine vergleichbare Alternative zu handelsüblichen K-S zu entwickeln. Der K-S erfüllt dabei die gesetzten Randbedingungen. Zusätzlich könnte während der Fahrt eine Drehung der Kamera auf dem Schlitten die Funktionsweise erweitern aber auch eine Spannungsüberwachung am Motor eine konstante Geschwindigkeit garantieren.
Dieses Projekt wurde unter dem Thema “Entwicklung, Bau und Ansteuerung eines Kamera-Sliders zur Realisierung von bewegten Zeitraffern” im Rahmen einer Komplexen Lernleistung 2019 bearbeitet und eingereicht. Diese KOL wird an einigen sächsischen Schulen in der 10. Klasse angefertigt und ermöglicht in der Oberstufe lediglich die Wahl und nicht die Pflicht der besonderen Lernleistung (BELL) als Ersatz eines P5 Prüfungsfaches oder einer vergleichbaren schriftlichen Arbeit. Diese Arbeit baut auf der Grundlage und dem Vorwissen einer Facharbeit zwei Jahre zuvor über den Mini Kamera-Slider auf. Dieser Artikel ist lediglich ein Einblick in die KOL.
[1] Wikipedia: Kamera-Slider, 2018: https://de.wikipedia.org/wiki/Kamera-Slider [14.11.2018]
[2] Edelkrone EU GmbH: SLIDERPLUS, o. J.: https://edelkrone.com/products/sliderplus [27.11.2018]
[3] Elbebilder: Kamera mit Arduino fernsteuern, 2012: http://technik.elbebilder.de/2012/12/03/kamera-mit-arduino-fernsteuern/ [22.12.2018]